





The NEURON-DONES project conducts research to ensure the optimisation and enhancement of processes at IFMIF-DONES, with the aim of making the most advanced industrial and technological trends available to the infrastructure from an early stage for optimal implementation.
![]()
To this end, NEURON-DONES is built upon four fundamental vectors: the sustainability of solutions; the most innovative aspects of safety; Intelligent Operation Management through artificial intelligence to enable rapid evolution of systems and operational plans until stable operation is achieved; and Data Flow Optimisation as the enabler and orchestrator of intelligence.
At Sener, we’re advancing technologies that guarantee the continuous availability of plant safety systems. Our research focuses on:
This project equips us with the expertise in instrumentation and diagnostics essential for future international scientific-technological installations in fusion-based renewable energy, such as DONES or DEMO.
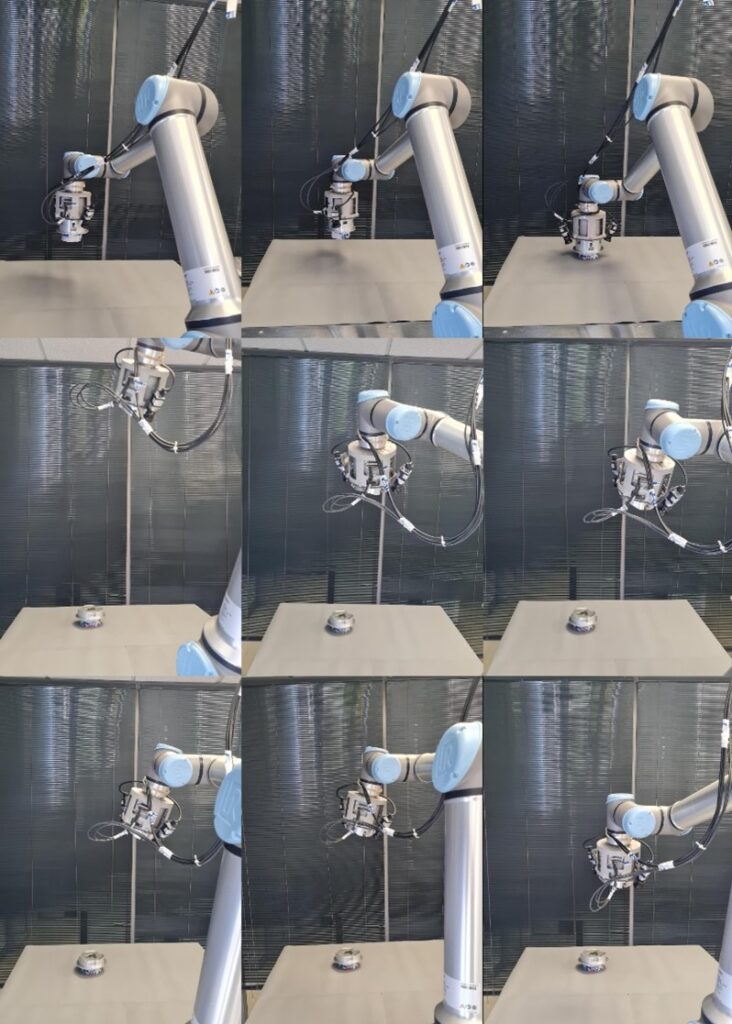
As part of the NEURON-DONES project’s development, the deliverable corresponding to Milestone 3 has been successfully completed, marking significant progress in validating critical technologies for highly demanding operational environments. During this phase, Sener concentrated on two key technological lines: firstly, the development of artificial intelligence algorithms for precise three-dimensional pose estimation of targets, based on the SIROM robotic interface architecture; and secondly, the implementation of visual detection and correction techniques to mitigate the adverse effects of radiation on images captured by the on-board vision system.
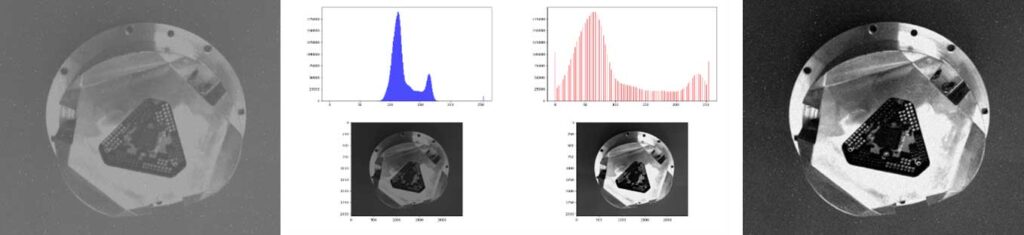
The pose-estimation algorithms have been designed to operate without artificial markers, relying solely on the environment’s visual features, which ensures robust and accurate positioning even in complex geometries. In parallel, deep learning models have been developed to identify typical visual degradations caused by ionising radiation—such as Gaussian noise, dead pixels, and contrast loss—and to apply reconstruction techniques that preserve the informational integrity of processed images.
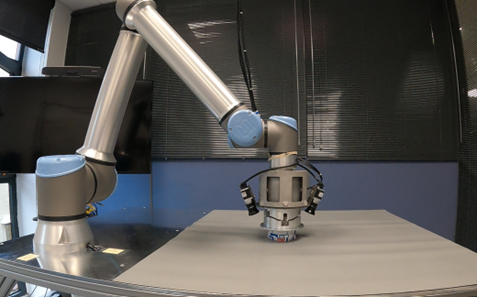
Both technologies are currently being integrated and validated on a robotic demonstrator within a controlled test environment that simulates representative operational conditions. This experimental platform allows the real-world interaction between perception and control systems to be evaluated and verifies the system’s stability and reliability in autonomous localisation and docking tasks.
The results obtained to date are technically promising and indicate a favourable trajectory towards the system’s full validation, reinforcing its applicability in scientific and industrial scenarios where autonomy, precision and resilience under extreme conditions are essential requirements.
This project (Exp. No. MIG-20221067) is funded by CDTI – the Centre for Technological Development and Innovation – under the 2022 “Misiones CDTI” Programme, and by the European Union’s NextGenerationEU recovery, transformation and resilience mechanism.
![]()
![]()
![]()
![]()

